

Un radiocommande parfaite pour débuter: la Radiomaster Crush: https://s.click.aliexpress.com/e/_c4KE6HWr

Les rates... les grands oubliés des réglages...
Quand on pense réglage et tuning du drone, on pense tout de suite aux PID. Et c'est vrai que ce sont des paramètres importants. Mais en général, on arrive tout de même à voler avec des PID stock (réglage d'usine) et les dernières versions de Betaflight facilitent grandement le réglage en utilisant des curseurs et des explications en pop up compréhensibles pour le commun des mortels. On parle moins souvent des rates... et c'est une erreur. Pourquoi?
C'est quoi les rates?
Après m'être pas mal renseigné, fait des essais en simulateur et en vol réel, voilà comment je peux expliquer ce que sont les rates. Je donne mon ressenti selon mon expérience. N'hésitez pas à aller voir d'autres points de vue sur helicomicro, We are FPV, Culture FPV, Oscar Liang etc... Sur un drone nous avons trois axes de vol: pitch, yaw, roll. Quand j'active les sticks de ma télécommande, je donne à mon drone une information de vitesse angulaire. Les rates vont me permettre de définir comment va réagir mon drone (en degrés par seconde) en fonction de mon positionnement de stick.
Comparaison avec sensibilité de la souris d'un ordinateur
Ça parait un peu compliqué comme ça mais pour faire simple, c'est comme quand vous ajustez la sensibilité de votre souris sur un ordinateur. Certains préfèreront un mouvement lent (surtout les débutants en informatique), d'autres auront un curseur qui réagira au centième de millimètre... En fait chacun a ses habitudes. Il n'y a pas de bon ou de mauvais réglage, il y a un réglage qui vous va. Par contre, si c'est mal réglé, travailler sur un PC pourra vite devenir pénible pour vous. Trop sensible et le curseur va trop vite et on le voit plus, trop lent et il faut faire de grands mouvements de souris pour bouger le curseur... C'est exactement ça sur un drone. Selon votre style de pilotage, votre expérience, il vous faudra un réglage de sensibilité confortable: Trop de sensibilité et le drone devient trop réactif et difficile à piloter, pas assez de sensibilité et vos manœuvres seront molles et lentes.

LES RATES c'est primordial
Je me posais souvent la question en voyant des vidéos de drone qui font un flip en 1/4 de seconde et je me demandais "comment font-ils? Une question de puissance de moteur? Pourquoi mon kwad est si mou?" La puissance des moteurs entre en ligne de compte, mais la réponse est dans le réglage des rates. Jusqu'alors, je ne m'y était pas intéressé parce que je débutais et que les réglages d'usine me convenaient. Jusqu'au jour où j'ai construit un drone qui était impilotable tellement il était sensible et là je me suis dit qu'il fallait faire quelque chose. Et je me rends compte qu'il est extrêmement important de savoir régler ses rates, peut-être même plus que les PID. Une fois les rates bien choisis et placés sur tous vos drones, vous allez pouvoir faire jouer votre mémoire musculaire, prendre des habitudes, avoir du feeling. Alors autant commencer par là.
Là où ça se complique
Régler la sensibilité d'une souris d'ordinateur, c'est facile. Il y a (en général) un curseur et c'est tout. Sur Betaflight chaque axe (pitch/roll/yaw) possède trois valeurs de réglage spécifiques:
Pourquoi 3 valeurs et pas une seule? Parce que quand on pilote, on ne souhaite pas que le drone réagisse de la même manière quand on est en début, en milieu ou en bout du stick de la télécommande. Ce serait très inconfortable. On a besoin d'être précis au milieu, alors que stick à fond, on souhaite avoir le mouvement maximal que peut fournir son drone.
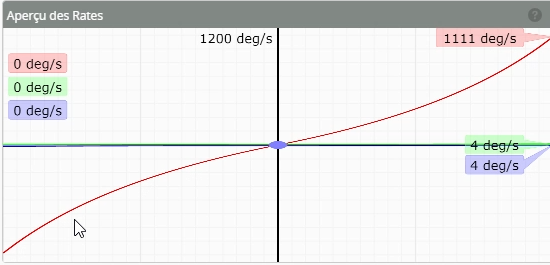
C'est pour ça qu'on traduit plus souvent les rates par une courbe: celle qu'on voit sur Betaflight ou sur des simulateurs. Cette courbe traduit la vitesse angulaire du drone sur un axe précis en fonction de la position du stick. Chaque axe (pitch/roll/yaw) possédant sa propre courbe, on a donc 3 courbes à ajuster, ce qui nous fait donc 9 valeurs à régler (vous suivez?). En plus il y a différentstypes de rates (Betaflight, kiss, etc...) Je n'aborde ici que les rates Betaflight pour plus de simplicité (c'est déjà assez compliqué comme ça!)
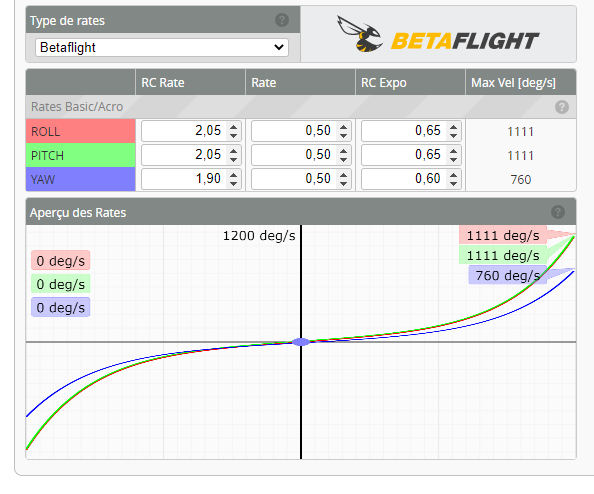
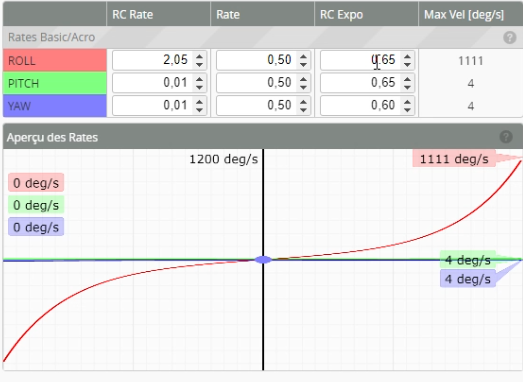
On a donc 3 valeurs par axe appelées RC rate, Rate et RC expo (sur BF configurator 10.9) Expliquer chaque valeur n'est pas très facile, alors on va essayer d'appréhender les notions de ces réglages avec un cas pratique, et en voyant comment réagi la courbe quand je mets ces valeurs au minimum ou au maximum.
Autre considération: En général, le roll et le pitch sont réglés de la même manière, le yaw est réglé mois sensible (mais c'est une question personnelle).
En fonction des versions de Betaflight ou des types de configurateurs, les noms RC rate, rate et expo peuvent changer... Une usine à gaz je vous dis... Par exemple sur l'image en dessous le RC RATE=RATE, le RATE = SUPER et RC EXPO devient EXPO. Quelle histoire de fous! Même si la dénomination change, l'essentiel est de retenir la fonction. En général, les valeurs sont placées dans le même ordre sur le tableau... Ça aide
Dans la suite j'utilise comme type de rates Betaflight et le Betaflight configurator 10.9

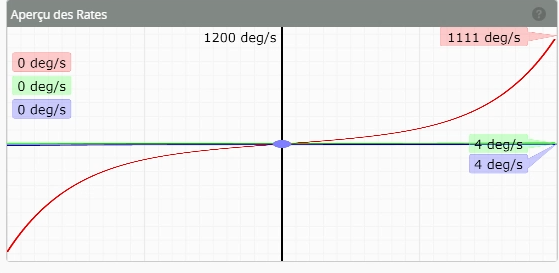
Les RC rates (ou rates)
En vulgarisant, c'est surtout ce paramètre qui va donner la patate à vos mouvements. Autant commencer par là. Ils servent surtout à déterminer la valeur de rotation maximale quand votre stick est au maximum ,soit à l'extrémité de la courbe. C'est cette valeur qui va déterminer la "nervosité" de votre kwad en fonction de votre pilotage. On met souvent une valeur autour de 800°/secondes. (ça veut dire que le kwad fait un peu plus de 2 tours par seconde sur lui même). Moins si vous pilotez en race (plus de précision), plus si vous êtes plutôt freestyle (mouvements rapides). Perso, je suis à 1110. Ce ne sera peut être pas la valeur idéale mais je me suis habitué à ce réglage là... Ça me fait un pilotage souple en milieu de stick, et une espèce de on/off en bout. C'est très personnel comme réglage... Et c'est pas dit que je le garderai vu que je suis en phase de test. Notez aussi que la tendance actuelle est à baisser les rates. (voir plus bas "le réglage des pros)
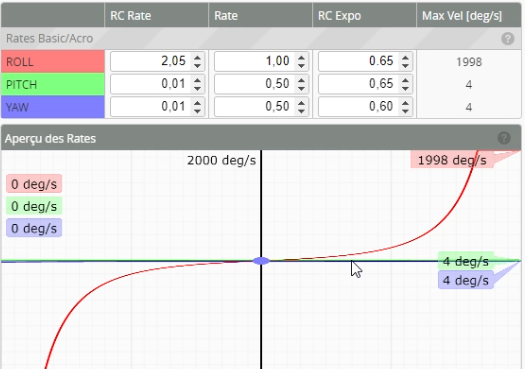
Les rates (ou super rates)
Pas touche! Perso je les met à 0,5 (positon neutre) et j'y touche plus. Ce paramètre est sensible car il crée une sorte d'accélération du mouvement en milieu de courbe (donc en milieu de stick). De plus, il augmente l'expo d'une manière importante. Ça peut être très déstabilisant car à partir d'une valeur, il suffit de bouger le stick d'un poil pour que la vitesse de rotation s'envole. En plus, pour compliquer le truc, y toucher va modifier la vitesse de rotation max déterminée avec les rates et ajouter de l'expo... Quelle galère!
Le RC expo
Valeur super importante. Ce réglage va donner la forme de la courbe. On serait tenté e mettre la courbe de réglage comme une ligne droite: A un mouvement de stick correspond une valeur, et ce d'une manière complètement linéaire (une ligne droite sur la courbe). Erreur, cela rendrait le kwad difficilement, avec un pilotage haché. (surtout si on débute)
Quand on pilote, on cherche plutôt en milieu de stick de la souplesse, de la précision. L'expo permet d'aplatir la courbe au milieu, le kwad a des mouvements plus lents dans cette zone, ce qui est appréciable pour faire de belles courbes. Attention, trop d'expo et la courbe est trop plate; il faut faire de grands mouvements de stick pour avoir un résultat minimum. En plus, le drone réagira très fort aux 3/4 du stick. Ça aussi c'est une question de préférences.

Entre ces 2 extrêmes il faudra trouver le juste milieu qui vous convient.
Ma méthode
Voilà une procédure qui vaut ce qu'elle vaut, mais je m'en suis pas trop mal sorti avec. J'ai fait tous mes réglages sur simulateur avant de les appliquer dans la réalité, je vous encourage à faire de même, c'est beaucoup plus facile.
D'abord, sur le roll et le pitch
1) Les super rates à 0,5. Comme je le dis plus haut, je touche pas à ce paramètre maudit.
2): Réglage de la vitesse de rotation max avec les rates. Question de feeling, je vois comment mon kwad réagit quand je pousse le stick à fond. Si j'arrive d'un coup de stick à faire un 360 degrés et à terminer pile poil à l'horizontale, je pense avoir trouvé la bonne valeur. ( 1110 dans mon cas).
3) Réglage expo. Je le mets à 0.65 . Cela me permet d'avoir un drone qui réagit raisonnablement en début de stick , ce qui me permet d'avoir un pilotage souple.
4) Pour le yaw, je reprends les réglages précédents mais je mets le rate et l'expo un peu moins élevé, ce qui me permet d'être plus souple dans les virages.
Faites des essais au simulateur
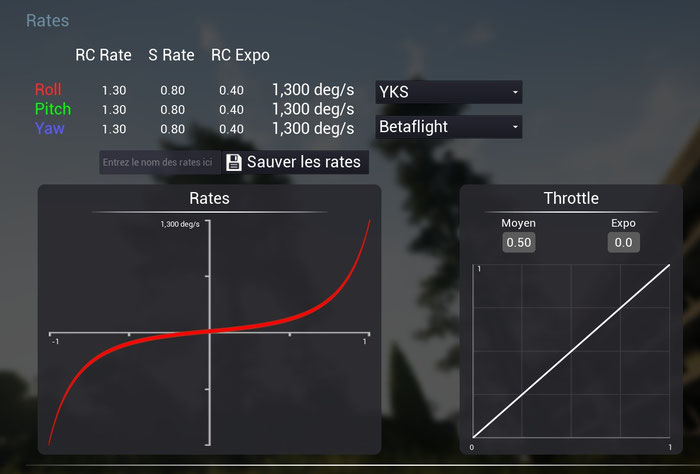
Aujourd'hui la plupart des simulteurs sérieux proposent l'ajustement des rates.Si vous voulez gagner du temps, affiner précisément votre réglage, faire plein d'essais: le simulateur est un outil formidable, ne passez pas à côté. De plus les simulateurs proposent souvent les rates de tel ou tel pilote, je pense notamment à Uncrashed, Ca permet d'expérimenter sans rien casser et quel gain de temps!
Le réglage des pros (edit 09/2024)
Dans un podcast le stud sur Culture PV, deux pros (Trinx et Edwin Hac) donnaient les réglages suivants pour leur vitesse de rotation max:
Pitch et Yaw: 462
Roll: 670
En écoutant ce podcast, il semble que plus on cherche à atteindre des rates parfaits, plus on tend vers ces valeurs que ce soit en race ou en freestyle. Essayez donc ces réglages éprouvés et validés qui seront certainement plus adaptés que les miens! J'essaierai prochainement ces valeurs. (EDIT j'ai essayé mais ça me va pas!)
Conclusion
Régler ses rates, c'est primordial mais c'est aussi une question personnelle. J'ai donné quelques pistes, donné mes préférences mais ça n'ira certainement pas à tout le monde. Si vous débutez, ces quelques conseils vous permettront de mettre un pied dans ces réglages pas toujours faciles à appréhender. Enfin, certains pilotent très bien avec des valeurs extrêmes, utilisent largement le super rate, ont une courbe toute plate ou toute linéaire, et ça leur va très bien. A vous de faire tous les essais possibles sur simulateur, de les tester en réel, de recommencer jusqu'à ce que vous ayez un bon feeling avec votre machine. Après, il est bien de régler tous vos drones de la même manière, vous aurez les mêmes sensations à chaque vol quelque soit le kwad. Bons réglages!

Alimentation stabilisée: indispensable pour les tests et les paramétrages de vos drones. (autour de 40€): https://s.click.aliexpress.com/e/_oDnBg8s
sur amazon: https://amzn.to/4nYft2E

Écrire commentaire
NC FPV (vendredi, 25 octobre 2024 09:35)
Pitch et Yaw: 462
Roll: 670
Rate clairement pour du cinématique et race.